Гармоническими законами называют законы синуса и косинуса. Следовательно, гармоническими колебаниями называют те колебания, при которых координата тела изменяется синусоидально или косинусоидально.
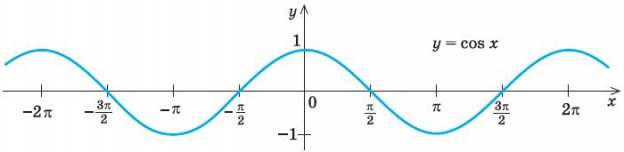
Ниже представлен график косинусоидальной функции. Обратите внимание, что косинус при возрастании аргумента от нуля сначала меняется медленно, а потом он все быстрее и быстрее приближается к нулю. Пройдя через него, его модуль снова быстро возрастает. Но по мере приближения к максимальному значению он снова замедляется. Точно так же меняются координаты свободно колеблющегося тела.
Важно! Гармоническими можно считать только те колебания, что совершаются грузом, закрепленном на пружине, или математическим маятником, отклоняемым на малый угол, при котором ускорение тела пропорционально его смещению.
Уравнение движения гармонических колебаний
Известно, что ускорение колеблющегося на пружине груза пропорционально его смещению от положения равновесия:
ax=−kmx
Также известно, что ускорение есть вторая производная координаты. Следовательно, при свободных колебаниях координата изменяется со временем так, что вторая производная координаты по времени прямо пропорциональна самой координате и противоположна ей по знаку.
x″
=−kmx
Вид уравнения гармонических колебаний зависит от начальных условий. Так, на характер колебательного движения влияет амплитуда, представляющая собой расстояние, на которое изначально было отклонено тело от положения равновесия. Амплитуда обозначается как xmax. Но нельзя просто считать, что x=xmaxcost или =xmaxsint, поскольку двойная производная от этих функций будет равна:
x″=−xmaxcost=−x
Видно, что в этом случае теряется величина km, служащая постоянной для каждой колебательной системы. Чтобы получить ее во второй производной, нужно усложнить функцию до следующего вида:
x=xmaxcos√kmt
Тогда первая производная примет вид:
x′=−√kmxmaxsin√kmt
Вторая производная примет вид:
x″
=−kmxmaxcos√kmt=−kmx
Так как мы получили ровно такое же выражение, то описать свободные колебания можно уравнениями следующего вида:
x=xmaxsin√kmt
x=xmaxcos√kmt
Обозначим постоянную величину √km, зависящую от свойств системы, за ω0:
ω0=√km
Тогда получим:
x=xmaxsinω0t
x=xmaxcosω0t
Само уравнение движения, описывающего свободные колебания, примет вид:
x″=− ω20x
Период и частота гармонических колебаний
Минимальный промежуток времени T, через который движение тела полностью повторяется, называют периодом колебания. Зная его, можно вычислить частоту колебаний, равную числу колебаний в единицу времени. Эти величины связаны между собой выражением:
ν=1T
Через промежуток времени, равный периоду T и соответствующий изменению аргумента косинуса на ω0T, движение тела повторяется, и косинус принимает прежнее значение. Но из математики известно, что наименьший период косинуса равен 2π. Следовательно:
ω0T=2π
Отсюда:
ω0=2πT=2πν
Таким образом, величина ω0 представляет собой число колебаний тела, но не за 1 секунду, а за 2π секунд. Эта величина называется циклической (круговой) частотой. А частоту свободных колебаний называют собственной частотой колебательной системы.
Зависимость частоты и периода свободных колебаний от свойств системы
Изначально за величину ω0 мы принимали постоянную, характеризующую свойства системы:
ω0=√km
Теперь мы выяснили, что циклическая частота связана с периодом и частотой колебаний. Следовательно, период и частота колебаний также зависят от свойств системы:
ω0=√km=2πT=2πν
Отсюда период и частота колебаний соответственно равны:
T=2πω0=2π√mk
ν=12π√km
Вспомним, что свойства колебательной системы математического маятника определяются постоянной величиной gl. Следовательно, циклическая частота для него равна:
ω0=√gl
Отсюда период и частота колебаний математического маятника соответственно равны:
T=2πω0=2π√lg
ν=12π√gl
Эта формула была впервые получена и проверена на опыте голландским ученым Г. Гюйгенсом, современником И. Ньютона.
Период колебания возрастает с увеличением длины маятника. От массы маятника он не зависит. Это легко проверить на опыте с различными маятниками. Зависимость периода от ускорения свободного падения также легко прослеживается. Чем меньше величина g, тем больше период колебания маятника, и, следовательно, тем медленнее идут часы с маятником. Так, часы с маятником в виде груза на стержне отстанут в сутки почти на 3 с, если их поднять из подвала на верхний этаж Московского университета, который находится на высоте 200 м. И это только за счет уменьшения ускорения свободного падения с высотой.
Зависимость периода колебаний маятника от значения g используется на практике. Измеряя период колебания, можно легко измерить g. Ускорение свободного падения меняется с географической широтой. Но и на данной широте оно неодинаково, так как плотность земной коры неоднородна. В районах, где залегают более плотные породы, ускорение свободного падения принимает большие значения.
Пример №1. Сколько колебаний совершает математический маятник длиной 4,9 м за время 5 минут?
5 мин = 300 с
Искомое число колебаний равно отношению времени к периоду колебаний:
N=tT
Период колебаний для математического маятника определяется формулой:
T=2π√lg
Тогда:
N=t2π√gl=3002·3,14√9,84,9≈68
Фаза колебаний
При заданной амплитуде гармонических колебаний координата колеблющегося тела в любой момент времени однозначно определяется аргументом косинуса или синуса, который равен ω0t. Обозначим его за ϕ и получим:
ϕ=ω0t
Величину ϕ, стоящую под знаком косинуса или синуса, называют фазой колебаний, описываемой этой функцией. Выражается фаза в угловых единицах — радианах (рад).
Фаза определяет значение не только координаты, но и других физических величин (к примеру, скорости и ускорения, которые также изменяются по гармоническому закону). Отсюда можно сделать вывод, что фаза определяет при заданной амплитуде состояния колебательной системы в любой момент времени.
Колебания с одинаковыми частотами и амплитудами могут отличаться друг от друга фазами. Так как ω0=2πT, фаза определяется формулой:
ϕ=ω0t=2πtT
tT — отношение, которое указывает, какая часть периода прошла от момента начала колебаний. Любому моменту времени, выраженному в долях периода, соответствует значение фазы, выраженное в радианах. К примеру:
| Время, t (с) | 0 |
T4 |
T2 |
3T4 |
T |
| Фаза, ϕ (рад) | 0 |
π2 |
π |
3π2 |
2π |
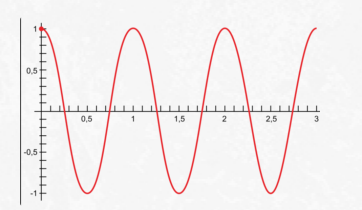
Можно изобразить на графике зависимость координаты колеблющейся точки не от времени, а от фазы. В этом случае графиком также будет являться косинусоида (или синусоида), но аргументом функции будет не время (период), а фаза, выражающаяся в радианах (см. рис.).
Синус от косинуса отличается только смещением аргумента на π2 (см. рис. ниже). Поэтому для описания гармонических колебаний можно использовать как синусоидальный, так и косинусоидальный закон.
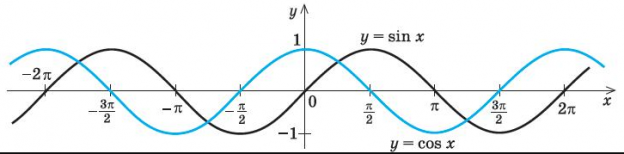
Выбор закона зависит от условий задачи. Если колебания начинаются с того, что тело выводят из положения равновесия и отпускают, удобнее пользоваться косинусоидальным законом, поскольку в начальный момент времени косинусоида показывает, что это тело отклонено максимально, а не находится в положении равновесия. Если для того чтобы начались колебания, совершают толчок, удобнее использовать синусоидальный закон, так как начальному моменту времени на синусоиде соответствует положение равновесия.
Колебания, совершаемые по закону синуса и косинуса, отличаются только фазой, которая смещена на значение, равное π2. Это значение называют сдвигом фаз, или их разностью. Поэтому косинусоидальная функция также может быть записана как:
x=xmaxcosω0t=xmaxsin(ω0t+π2)
Превращение энергии при гармонических колебаниях
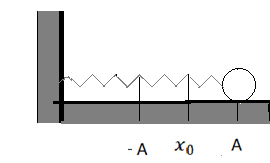
Чтобы описать превращения энергии при гармонических колебаниях, условимся, что силой трения будем пренебрегать. Для описания обратимся к рисунку ниже.
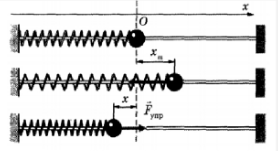
Точке О на рисунке соответствует положение равновесия шарика. Если его оттянуть на расстояние xmax, равное амплитуде, пружина получит потенциальную энергию, которая примет в этом положении максимальное значение, равное:
Wp max=kx2max2
Когда шарик отпускают, возникает сила упругости, под действием которой шарик устремляется влево. По мере уменьшения расстояния между точкой максимального отклонения и положением равновесия уменьшается и потенциальная энергия. Но в это время увеличивается кинетическая энергия шарика. Когда шарик проходит через положение равновесия в первый раз, его потенциальная энергия становится равной нулю, а кинетическая энергия обретает максимальное значение (скорость в этот момент времени тоже максимальна):
Wk max=mv2max2
После прохождения точки О расстояние между шариком и положением равновесия снова увеличивается, и потенциальная энергия растет. Кинетическая же энергия при этом уменьшается. А в крайнем положении слева она становится равной нулю, в то время как потенциальная энергия снова примет максимальное значение.
Так как мы условились пренебрегать трением, данную колебательную систему можно считать изолированной. Тогда в ней должен соблюдаться закон сохранения энергии. Согласно ему, полная механическая энергия системы равна:
W=Wp+Wk=kx2x2+mv2x2=kx2max2=mv2max2
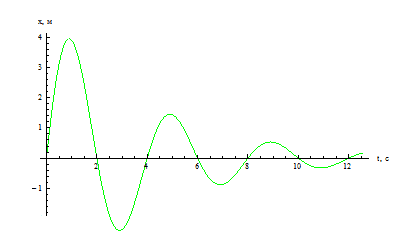
В действительности свободные колебания всегда затухают, так как в колебательной системе действует сила трения. И часть механической энергии рассеивается в виде тепла. Пример графика затухающих колебаний выглядит следующим образом:
Пример №2. Груз, прикрепленный к пружине, колеблется на горизонтальном гладком стержне. Найдите отношение кинетической энергии груза к его потенциальной энергии системы в момент, когда груз находится в точке, расположенной посередине между крайним положением и положением равновесия.
Так как груз находится посередине между крайним положением и положением равновесия, его координата равна половине амплитуды:
x=xmax2
В это время потенциальная энергия груза будет равна:
Wp=kx22=k(xmax2)22=kx2max8
Согласно закону сохранения энергии, кинетическая энергия в это время равна:
Wk=W−Wp
Полная механическая энергия системы равна максимальной потенциальной энергии:
W=Wp max=kx2max2
Тогда кинетическая энергия равна:
Wk=kx2max2−kx2max8
Следовательно, отношение кинетической энергии к потенциальной будет выглядеть так:
WkWp=kx2max2−kx2max8kx2max8=kx2max28kx2max−1=4−1=3
Резонанс
Самый простой способ возбуждения незатухающих колебаний состоит в том, что на систему воздействуют внешней периодической силой. Такие колебания называют вынужденными.
Работы силы над такой системой обеспечивает приток энергии к системе извне. Приток энергии не дает колебаниям затухнуть, несмотря на действие сил трения.
Особый интерес вызывают вынужденные колебаний в системе, способной совершать свободные колебания. Примером такой системы служат качели. Их не получится отклонить на большой угол всего лишь одним толчком. Если их толкать то в одну, то в другую сторону, тоже ничего не получится. Но если подталкивать качели всякий раз, как они сравниваются с нами, можно раскачать их очень сильно. При этом не нужно прикладывать большую силу, но на это понадобится время. Причем после каждого такого толчка амплитуда колебаний качелей будет увеличиваться до тех пор, пока не достигнет своего максимального значения. Такое явление называется резонансом.
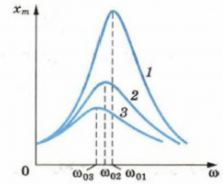
Графически явление резонанса можно изобразить как резкий скачок графика вверх (см. рис. выше). Причем высота «зубца», или амплитуда колебаний, будет зависеть от величины сил трения. Чем больше сила трения, тем меньше при резонансе возрастает амплитуда вынужденных колебаний. Это можно продемонстрировать графиками на рисунке ниже. Графику 1 соответствует минимальное трение, графику 3 — максимальное.
На явлении резонанса основан принцип работы частотомера — устройства, предназначенного для измерения частоты переменного тока. Он состоит из набора упругих пластин, которые закреплены на одной планке. Каждая пластина обладает определенной собственной частотой колебаний, которая зависит от упругих свойств, длины и массы. Собственные колебания пластин известны. Под действием электромагнита планка, а вместе с ней и пластины совершают вынужденные колебания. Но лишь та пластина, собственная частота которой совпадает с частотой колебаний планки, будет иметь большую амплитуду колебаний. Таким образом, определяется частота переменного тока.
Пример №3. Автомобиль движется по неровной дороге, на которой расстояние между буграми равно приблизительно 8 м. Период свободных колебаний автомобиля на рессорах 1,5 с. При какой скорости автомобиля его колебания в вертикальной плоскости станут особенно заметными?
Колебания автомобиля в вертикальной плоскости будут заметны тогда, когда частота наезда на бугры сравняется с частотой свободных колебаний автомобиля на рессорах. Поскольку частота обратно пропорциональна периоду, можно сказать, что резонанс будет достигнут тогда, когда автомобиль будет наезжать на бугры каждые 1,5 секунды. Зная расстояние между буграми и время, можем вычислить скорость:
v=st=81,5≈5,33 (мс)≈19,2(кмч)
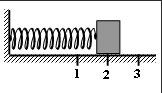 Груз изображённого на рисунке пружинного маятника совершает гармонические колебания между точками 1 и 3. Как меняются кинетическая энергия груза маятника, потенциальная энергия и жёсткость пружины при движении груза маятника от точки 2 к точке 3? Для каждой величины определите соответствующий характер её изменения:
Груз изображённого на рисунке пружинного маятника совершает гармонические колебания между точками 1 и 3. Как меняются кинетическая энергия груза маятника, потенциальная энергия и жёсткость пружины при движении груза маятника от точки 2 к точке 3? Для каждой величины определите соответствующий характер её изменения: